Geotimes

Feature
Landing the
Mars Exploration Rovers
Matthew P. Golombek, John A.
Grant, Timothy J. Parker, Joy A. Crisp, Steven W. Squyres
Next January, two spacecraft — one on Jan. 4 and the other on Jan. 25
— will end a seven-month cruise from Earth and begin to land on Mars.
Each one will enter the martian atmosphere at about 5,400 meters per second,
using a heat shield to slow itself down. At about 8 kilometers above the surface,
it will deploy a high-speed parachute to reduce its velocity from 434 meters
per second to 110. Twenty seconds after deploying its parachute, the lander
will drop its heat shield and descend below the backshell on a tether 20 meters
long. It will take several pictures to determine at what direction and velocity
it is traveling relative to the planet’s surface. At about 2.4 kilometers
above the surface, its altimeter will kick in, sending radar to the surface
in order to measure its distance from the surface and thus begin to calculate
its closing velocity. Then its airbags will inflate.
The landing site must be just right: If the surface has steep slopes, the radar
altimeter may get confused. If the ground is too dusty, the radar may not reflect
back. If the surface it approaches is too elevated, its parachute will not have
been open long enough for it to calculate its terminal velocity.
At about 134 meters above the surface, it will fire its retro-rockets to bring
its vertical velocity near zero. It might also fire transverse rockets on its
backshell to reduce its horizontal velocity. About 15 meters above the surface,
it will cut its tether, and then bounce to the ground. And it will bounce, bounce,
bounce, bounce — probably as much as a kilometer, protected within it inflated
airbags. And then, only after it has landed safely, can it begin to do science.



The landing sites for the Mars Exploration
Rovers have been carefully selected not only for their scientific value, but
also to insure that the rovers land safely and function as planned. These animations
show the entry, decent and landing of the spacecraft. Inflated airbags will
protect the rovers as they bounce as much as a kilometer after landing. JPL/NASA.
The airbags will deflate and retract, the lander petals open and out will come
a Mars Exploration Rover (MER) to explore its surroundings. It will stand up
and drive off, carrying its own computer and antennas to communicate directly
with Earth and with spacecraft already orbiting Mars that will then relay information
to Earth and the scientists waiting for the data the rover collects.
Each rover, both scheduled to launch next month, will carry a suite of instruments
to conduct field geology: a stereo panoramic camera and infrared spectrometer
(for understanding topography, morphology and mineralogy of surface materials);
and a robotic arm that carries a Rock Abrasion Tool (to remove the outer, potentially
weathered, surface material from rocks), Mössbauer spectrometer (for iron-bearing
mineralogy), Alpha Particle X-Ray spectrometer (for elemental chemistry), and
a Microscopic Imager for close-up examination of rocks and soils. (See also
a story online later this month for more details.)
The rovers’ task is to search for evidence of past aqueous activity and,
especially, to assess the past habitability of the environment in which the
rocks at their respective landing sites formed. Each rover can drive as many
as 100 meters in a martian day, or Sol — that’s as far as its predecessor,
Mars Pathfinder, traveled in its entire mission. Each rover should travel 600
meters before it completes its mission, and operate for 91 Sols, which is three
times longer than Pathfinder’s nominal one-month mission (although Pathfinder
did operate for three months).
Deciding where on Mars to land these robotic geologists has occupied more than
two years of research and analysis and incorporated the participation of broad
sections of the planetary sciences community. We have been fortunate to be involved
in selecting the MER sites, a process that has involved two parallel and intertwined
activities. First, the engineering constraints on the landing site were defined
based on preliminary spacecraft design and the landing scenario. These engineering
constraints were continually revised and reassessed as the spacecraft design
matured and as testing was conducted. At the same time, the preliminary engineering
constraints were mapped into suitable areas of Mars. The search for potential
landing sites began early to allow time for acquiring new remote sensing data
from spacecraft now orbiting the planet.
The process of selecting the two landing sites benefited from an unprecedented
explosion of new information about Mars. This information has addressed the
most important aspect of the site selection process, one that must be considered
before science questions can even be asked: We must consider the safety of landing
the spacecraft on the planet and its ability to carry out its exploration mission.
Site safety has been of paramount importance in this landing site selection
effort (like all to date), for the simple reason that the spacecraft must land
safely before any science results can be obtained. Any other approach would
place both the mission and the program at risk.
Unlike past landing site selection activities, those of us working on the MER
project could, during the selection process, acquire new data from two orbiting
spacecraft, Mars Global Surveyor and Mars Odyssey. In contrast, the Viking landing
site selection relied mostly on Mariner 9 information prior to arrival and,
after arrival, on an intense effort to find new sites when Viking Orbiter images
showed that previously identified sites appeared too dangerous. Although the
Mars Pathfinder landing site selection effort had little new data since Viking,
there was a much greater appreciation and understanding of how the Viking 1
and 2 landing surfaces related to Viking orbital data. In addition, Mars Pathfinder
landed downstream from the mouth of a giant catastrophic outflow channel, for
which a clear Earth analog exists in the Channeled Scabland of Washington State;
this analog helped improve confidence in the interpretation of the surface before
landing and accurately predicted the surface Pathfinder landed on.
The newly acquired information about Mars from Global Surveyor and Odyssey has
resulted in the best-imaged, best-studied locations in the history of Mars exploration.
These data have enabled us to address in detail the major engineering constraints
and the science potential (including specific, testable hypotheses) of the landing
sites. Specific data used in the MER site selection effort include: Viking images,
Viking InfraRed Thermal Mapper data, data from the Viking and Mars Pathfinder
landing sites, Earth-based radar, data from Mars Global Surveyor (specifically,
the Mars Orbital Laser Altimeter, Thermal Emission Spectrometer and Mars Orbiter
Camera), and the Thermal Emission Imaging System aboard Mars Odyssey.
The big three
The areas that satisfy the basic engineering requirements of the mission represent
just 5 percent of the surface area of Mars and form the starting locations to
begin identifying potential landing ellipses. This first-round elimination of
95 percent of the planet results from three basic criteria: elevation, latitude
and surface dust.
The rovers will be powered by sunlight. This constraint eliminates most of the
planet. The landing sites must be close to the equator — specifically,
between 5 degrees north and 15 degrees south for the first Mars Exploration
Rover (MER-A), and between 10 degrees north and 10 degrees south for the second
(MER-B). (Operations and data return are dramatically improved if the two landing
sites are separated by a minimum central angle of 37 degrees on the surface.)
Within this band, we considered elevation next. Mars has a kind of gravitational
sea-level or geopotential surface — a geoid defined by the topography returned
by the Mars Orbital Laser Altimeter and by the planet’s gravity. How far
above or below this geoid a rover lands will determine, to first order, how
much atmosphere is above it. The lander needs enough atmosphere above it so
that its parachute can bring the spacecraft to the correct terminal velocity
and give the spacecraft enough time to measure its closing velocity, inflate
the airbags and fire the solid rockets. Analysis of the entry, descent and landing
system and atmospheric profiles for the season and time of arrival indicates
that the MER spacecraft can land 1.3 kilometers below the geoid.
Portions of Mars are also extremely dusty. Areas with thick deposits (several
meters) of dust are not suitable landing sites. The surface must be radar reflective
for the descent altimeter, which the spacecraft uses to measure its altitude
as it lands. Some dust-covered areas on Mars do not reflect radar waves. Also,
dust deposits encountered at the Viking 1 and Mars Pathfinder landing sites
were not load bearing, thus a landing spacecraft could sink. And landing in
a dusty area could also coat the solar panels and reduce rover power.
One tool for determining whether an area is rocky or dusty is thermal inertia,
or how rapidly materials change temperature. Dusty areas change temperature
quickly and thus have low thermal inertias. Areas of high albedo and very low
thermal inertias are not good landing sites.
Within the latitude and elevation constraints, the largest region is in southern
Elysium and Amazonis Planitiae. Unfortunately, most of this area (135 degrees
west to 200 degrees west) is dominated by extremely low thermal inertia and
so was excluded.
As a result, areas available in which to seek landing sites were reduced to
southern Isidis and Elysium Planitiae in the eastern hemisphere and western
Arabia Terra, Terra Meridiani, Xanthe Terra, Chryse Planitia and the bottom
of Valles Marineris in the western hemisphere.
Next we took the landing ellipses (how accurately the landers can be targeted
on Mars) and tried to fit as many ellipses as we could in areas that met the
above three criteria. We aimed for areas that also appeared smooth and flat
at a kilometer scale, without scarps, large hills, depressions or large, fresh
craters (more than 5 kilometers in diameter). Preliminary landing ellipse size
and orientation (which change significantly with latitude and time of arrival)
vary linearly in length and azimuth from about 80 kilometers by 30 kilometers
at 15 degrees south to about 335 kilometers by 30 kilometers at 15 degrees north,
oriented along the roughly east-west entry trajectory. About 155 landing sites
fit all of the above criteria. Geologic units accessible are diverse and range
from Noachian Plateau dissected, hilly, cratered and subdued cratered units;
to Hesperian ridged plains and channel materials; to the Vastitas Borealis Formation;
to Amazonian smooth plains, channel materials, volcanics and knobby materials;
to the Medusae Fossae Formation.
Science weighs in
The essential scientific driver for where to land the rovers is the likelihood
that past aqueous activity may have created a habitable environment, and the
likelihood that evidence for past habitable conditions will be preserved in
a form that can be studied using the science payload. From these 155 sites,
we narrowed the selection down to about 30 based on preferences from the scientific
community. Potential landing sites were prioritized according to their science
potential relative to the science objectives of the mission during the first
open community landing site workshop held in January 2001. From this workshop,
about 25 sites were targeted to be imaged by the Mars Orbiter Camera (MOC) aboard
Mars Global Surveyor so that we could study the sites in more detail.
Six sites were selected for more detailed analysis at the Second Landing Site
Workshop in October 2001. For these sites, we acquired additional MOC images
and the Thermal Emission Imaging System aboard the Mars Odyssey (which by then
had just arrived at the planet).
These six sites were evaluated in detail and prioritized in terms of both science
and safety at the Third Landing Site Workshop held in March 2002. Three sites
were removed due to safety concerns and a fourth site was added based on safety.
The Fourth Landing Site Workshop held in January 2003 confirmed two sites (Meridiani
Planum and Gusev crater) as the highest-priority science sites. The Athena Science
Team, the science team selected by NASA to carry out the mission, almost unanimously
endorsed these two sites.
 The final four sites,
from which two were chosen, are: Meridiani Planum, Gusev crater, Isidis Planitia
and Elysium Planitia. Three showed evidence for surface processes involving
water and appeared capable of addressing the science objectives of the MER missions.
Thermal Emission Spectrometer results indicate coarse-grained, crystalline hematite
distributed across a basaltic surface at the Meridiani site, suggesting precipitation
from liquid water or a hydrothermal deposit. Gusev has been interpreted as a
crater lake with interior sediments deposited in standing water. Isidis Planitia
may contain a sampling of ancient rocks shed off the highlands, which may record
an early warm and wet environment, as suggested by the abundant valley networks.
The Elysium site is located on a transitional surface between the highlands
and lowlands and may preserve reworked, ancient highlands materials.
The final four sites,
from which two were chosen, are: Meridiani Planum, Gusev crater, Isidis Planitia
and Elysium Planitia. Three showed evidence for surface processes involving
water and appeared capable of addressing the science objectives of the MER missions.
Thermal Emission Spectrometer results indicate coarse-grained, crystalline hematite
distributed across a basaltic surface at the Meridiani site, suggesting precipitation
from liquid water or a hydrothermal deposit. Gusev has been interpreted as a
crater lake with interior sediments deposited in standing water. Isidis Planitia
may contain a sampling of ancient rocks shed off the highlands, which may record
an early warm and wet environment, as suggested by the abundant valley networks.
The Elysium site is located on a transitional surface between the highlands
and lowlands and may preserve reworked, ancient highlands materials.
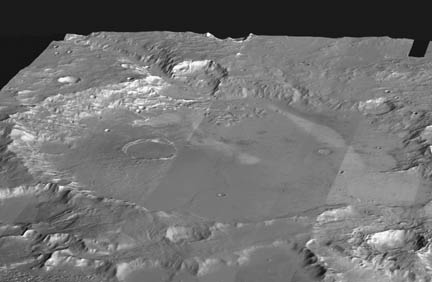
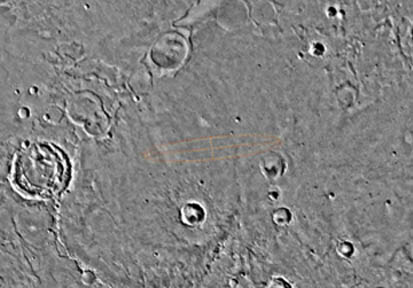
The two landing sites: AT the top right
is a mosaic showing Gusev crater. Infrared images taken by instruments aboard
Mars Odyssey are draped over topography data acquired by the Mars Global Surveyor.
At the top of the mosaic is a large channel that was likely cut by running water.
Below is the Meridiani Planum as photographed by the Viking missions. Both sites
lie within a 15-degree swath of the planet's equator. JPL/NASA.
 The results
of the third and fourth workshops included detailed hypotheses testable using
the specific observations that Athena — the suite of instruments aboard
the rovers — will make on Mars. These hypotheses indicated that the Meridiani
and Gusev sites most directly address the MER scientific objectives because
they have strong mineralogical and geomorphological indicators of liquid water
in their pasts, respectively. Isidis and Elysium may also address these scientific
objectives if Noachian rocks are preserved at the sites either formed in a warmer
and wetter past or were deposited by liquid water.
The results
of the third and fourth workshops included detailed hypotheses testable using
the specific observations that Athena — the suite of instruments aboard
the rovers — will make on Mars. These hypotheses indicated that the Meridiani
and Gusev sites most directly address the MER scientific objectives because
they have strong mineralogical and geomorphological indicators of liquid water
in their pasts, respectively. Isidis and Elysium may also address these scientific
objectives if Noachian rocks are preserved at the sites either formed in a warmer
and wetter past or were deposited by liquid water.
A major science objective at the Meridiani Planum site is to determine what
process formed the hematite, which is inferred from analyses of Thermal Emission
Spectrometer data to cover approximately 15 to 20 percent of the surface. Preferred
mechanisms for the hematite formation include direct precipitation from oxygenated,
iron-rich water in a lake; precipitation from iron-rich hydrothermal fluids
involving water percolating through the ground at high temperatures, or low-temperature
dissolution and precipitation (i.e., leaching). Geologic hypotheses for the
origin of the hematite deposits include deposition in an ancient lake; or as
a volcaniclastic unit within a stack of ancient Noachian units emplaced either
directly as discrete grains or within glassy coatings, or via alteration after
burial of the deposits; or as magnetite-rich lavas that have undergone high-temperature
alteration. The Athena payload is particularly well suited to measure iron rich
minerals and thus should be able to differentiate among these hypotheses.
Gusev is an ancient, flat-floored crater that is 160 kilometers in diameter
and close to the highland-lowland boundary south of Elysium. Its southern rim
is breached by Ma’adim Vallis, which, at 800 kilometers long, up to 25
kilometers wide, and 2 kilometers deep, is one of the largest branching valley
networks on the planet and may drain a large area of the highlands. Ma’adim
Vallis appears to have been cut by running water, so that the crater would have
filled with sediment carried into a standing body of water before it exited
through a gap in the northern rim of the crater. A landing in Gusev therefore
would provide an opportunity to study fluvial sediments derived from the southern
highlands and deposited in a lacustrine environment. Such sediments may preserve
important clues about environmental conditions on early Mars, which are, of
course, of particular interest for determining the planet’s potential habitability.
Balancing science and safety
At the same time that we considered the science priorities of potential landing
sites, we had to carefully evaluate candidate sites for safety. Testing of the
landing system indicated that the three dominant safety concerns are winds,
slopes at the scale of the airbags, and rocks.
Low-altitude winds and wind shear together are major concerns as testing showed
that grazing impacts could tear the airbags against rocks. Areas with low rock
abundance were thus preferred over areas with high rock abundance to reduce
airbag abrasion or potential stroke-out on rocks higher than 0.5 meters (against
which the airbags were successfully tested). Low slopes at the scale of the
lander are also preferred to reduce low-angle impacts and enhanced bounces.
In addition, low slopes over horizontal scales of 100 meters are preferred to
reduce the possibility of spoofing the radar altimeter, causing solid rocket
firing or airbag inflation too early or too late. Finally, slopes over a 1-kilometer
horizontal scale should be low to minimize bouncing. Specific requirements are
that the slope over 1 kilometer should not exceed 2 degrees; over 100 meters,
it should be less than 5 degrees; and over 10 meters, less than 15 degrees.
The first two slope requirements were evaluated with Mars Orbiter Laser Altimeter
data and the third with stereo Mars Orbiter Camera images. Rock abundance was
estimated from differencing thermal infrared measurements and winds were evaluated
with atmospheric circulation models.
The intertwining of science and safety concerns continued even as the final
four sites were compared. The project engineers incorporated winds, slopes and
rocks into a simulation of entry, descent and landing to determine the relative
safety of the four sites. Meridiani and Elysium appear to be the safest, followed
by Gusev and Isidis.
Horizontal winds and wind shear are lowest at Meridiani and Elysium and higher
at Gusev and Isidis. Rock abundance is lowest at Meridiani and Elysium, slightly
higher at Gusev and higher still at Isidis. Slopes at the scale of the airbags
are, in order of increasing slopes: Meridiani, Elysium, Isidis and Gusev.
In April, NASA Headquarters decided that MER-A should go to Gusev and MER-B
should go to Meridiani, to maximize the lifetime, science operations and data
return at Gusev. The selection of Meridiani is clearly based on its high scientific
merit and on the fact that it is the safest of all four sites. Gusev crater
won for its balance of high scientific merit and safety.
Golombek,
Parker and Crisp are research scientists with the Jet Propulsion Laboratory, California
Institute of Technology, in Pasadena, California, which is NASA’s lead center
for planetary exploration.
Crisp is the Mars Exploration Rover Project Scientist and served as Deputy Rover
Scientist on the Mars Pathfinder mission.
Parker is a member of NASA’s Mars Landing Site Steering Committee and has
participated heavily in the definition and selection of both the Mars Pathfinder
and the MER landing sites. He participated in Mars Pathfinder operations as chair
of the Geology and Geomorphology Science Operation Group and is a member of the
Athena Science Team.
Golombek is the JPL Mars Exploration Program Landing Site Scientist, co-chair
of NASA’s Mars Landing Site Steering Committee, and a member of the Athena
Science Team and a MER Science Operations Working Group chair. He was the chief
scientist of the Mars Pathfinder mission that landed and roved successfully in
1997 and led the landing site selection activity as well as surface science operations
for that mission.
Grant is a research scientist with the Center for Earth and Planetary Studies
at the Smithsonian Institution’s National Air and Space Museum in Washington.
He is co-chair of NASA’s Mars Landing Site Steering Committee, a member of
the Athena Science Team and a MER Science Operations Working Group Chair.
Squyres is a professor in the Department of Astronomy at Cornell University in
Ithaca, N.Y. He is the Principal Investigator in charge of the Athena science
instrument payload and investigation as well as a MER Science Operations Working
Group Chair.
A special section of the Journal of Geophysical Research, Planets is in
review, which contains papers describing the MER mission, the Athena science instruments,
the landing site selection, and contributions on individual landing sites that
were considered.
Back to top
